I’ve been meaning to document project specifics as I develop in an attempt to share my software and provide an explanation as to how and why I chose a particular approach. I’d also like to provide readers with usable code that can be adapted to their own projects. Hopefully, this short article will be the first of many.
One of the most common devices that I see developers using are ultrasonic range finders. Not surprisingly, there are quite a few out there to choose from. They vary widely in terms of range capability, accuracy, interface flexibility, and price. The US-100 Ultrasonic Sensor Module with Temperature Compensation (datasheet here) seems to offer the most bang for the buck if you’re project calls for fairly accurate measurements ranging from 4mm to about 4.5m in varying temperature environments. It can also provide accurate temperature measurements while offering both pulse width data as well as serial data interfaces for range and temperature (configurable via shunt). I’ve used this module as a supplement to infrared ranging and found it to be very reliable. The module can usually be found for <US$3.00.
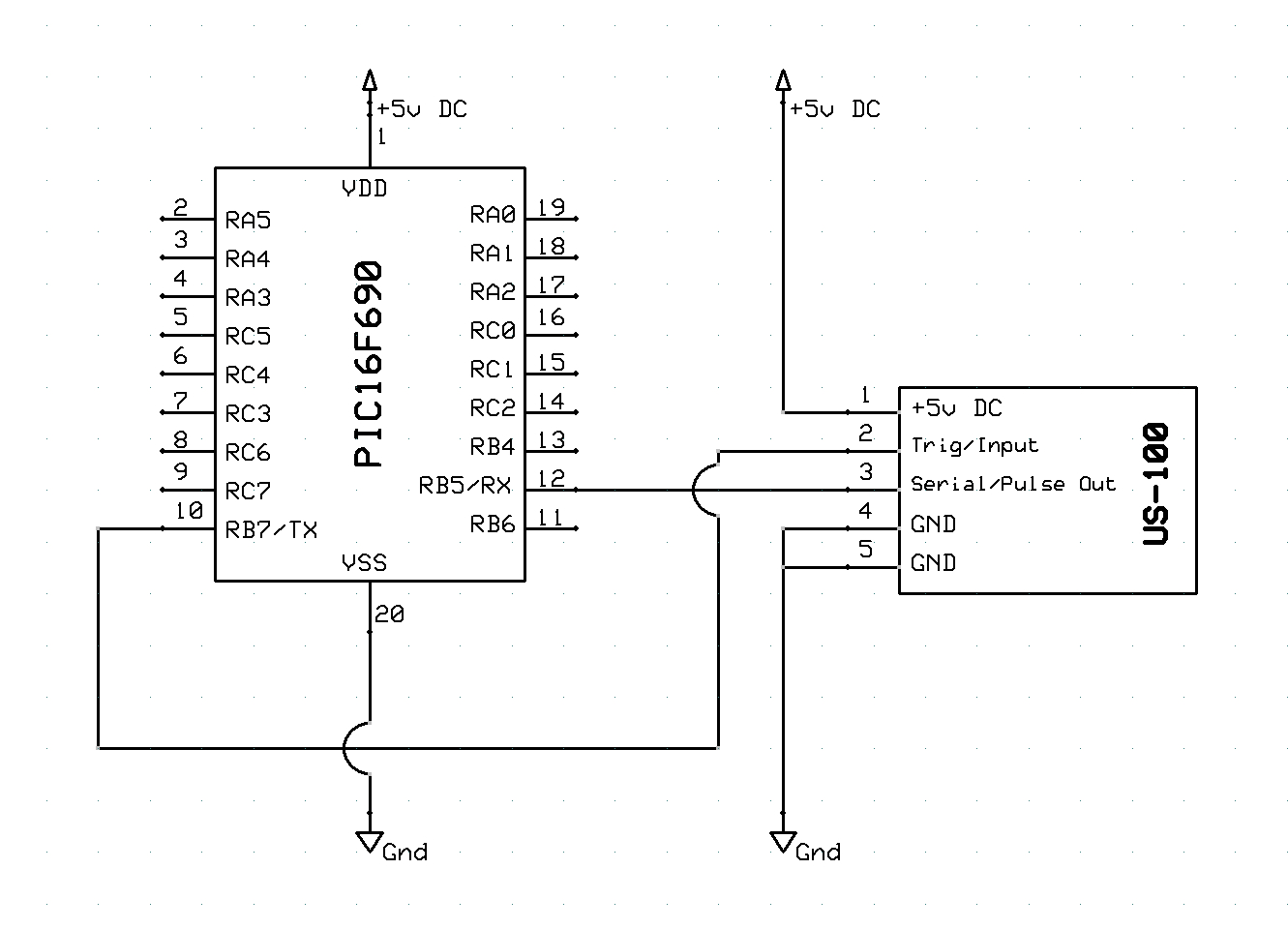
In this example, I’m using a Microchip PIC16F690 mid-range microcontroller and PIC assembly written specifically for GPUtils 1.4.x. This software will most likely assemble using MPASM as well all though I haven’t tried. While the actual project implementation uses many macros and library routines, I’ve flattened the example into a single ASM file that contains just instructions relevant to read data from the module. Also worth noting is that I’m using the serial peripheral of the microcontroller, but this type of simple communication could be accomplished by implementing 9600 baud data send and receive in software. The microcontroller is configured to use it’s internal oscillator configured at 4MHz which means that the instruction clock will be executing at 1MHz. Obviously, this post was written with the assumption that the reader has at least a passing familiarity with PIC Microcontroller programming and assembly language, specifically PIC Assembly.
Here is a quick and dirty schematic showing the connections between the microcontroller and the ultrasonic range measuring module:
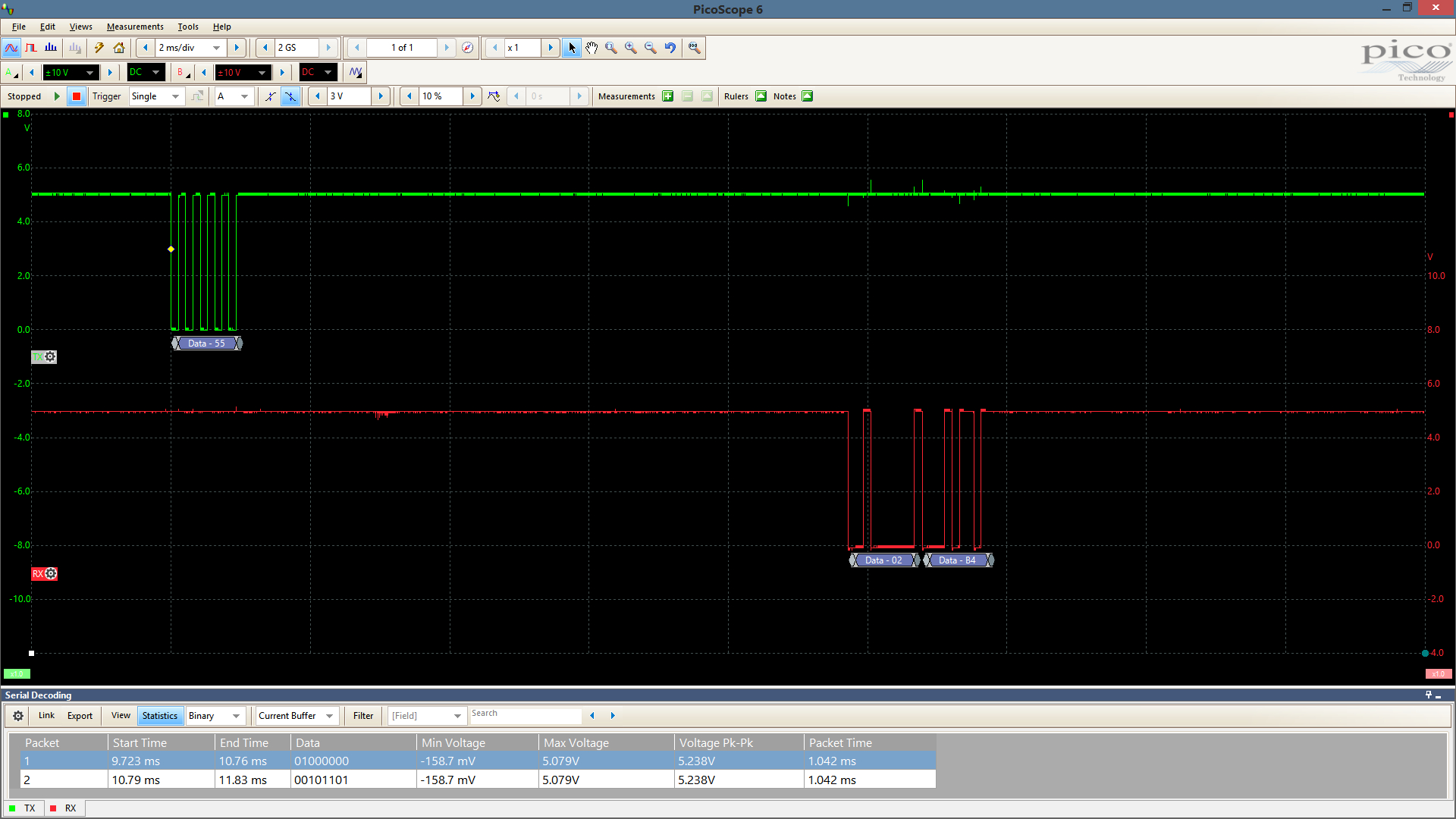
And a quick digital capture of the communication over RB7 and RB5:
The code is generously commented, so I won’t provide a detailed explanation here. If you have any questions or suggestions, feel free to leave a comment.
;----------------------------------------------------------------------------- ; File: main.asm ; Date: 09/17/2016 ; Purpose: Ultrasonic module control. This module must run at 4MHz due to ; baud-rate generator configuration. ; ; $Author: jcleland $ ; $Log$ ;----------------------------------------------------------------------------- ;----------------------------------------------------------------------------- ;Set configuration bits ; ;----------------------------------------------------------------------------- __CONFIG(_PWRTE_OFF&_INTRC_OSC_NOCLKOUT&_BOR_OFF&_WDT_OFF&_MCLRE_OFF&_CP_OFF&_IESO_OFF&_FCMEN_OFF) ;Disable benign warnings ERRORLEVEL -207 ERRORLEVEL -302 #include "P16F690.inc" ;Define oscillator configuration bits for OSCON register #define __OSCCONFREQBITS b'01100000' ;----------------------------------------------------------------------------- ;Define constants for communicating with ultrasonic range module #define START_RANGE 0x55 ;----------------------------------------------------------------------------- ;Local data declaration ; .main.data udata count res .2 ;General purpose registers for looping timedelay res .2 ;The delay value (16 bit) for status LED sleepCount res .1 ;Register used for counting sleep delays ;----------------------------------------------------------------------------- ;Macro definitions _Delay250us macro local __loop banksel sleepCount ;Select bank (2 cycles) movlw .82 ;Load accumulator for 82 loops movwf sleepCount ; store in counter register, 2 cycles __loop decfsz sleepCount,f ;Decrement the counter and loop goto __loop ; each loop takes 3 cycles, last one is 2 nop ;Extra cycle endm ;Cycles=2+2+(82*3-1)+1=250us ;----------------------------------------------------------------------------- ; Program start jumps to Start label ; ;Be sure to skip to the starting point .romStart code 0x00 goto Start ;Startup jumps to Start label ;----------------------------------------------------------------------------- ;Jump to interrupt handler ; .romInterrupt code 0x04 ;Jump to interrupt handler from here goto Interrupt ;----------------------------------------------------------------------------- ;Begin code section ; .master.code code ;----------------------------------------------------------------------------- ; Subroutine: Start ; Purpose: ; Start: ;Global Interrupt disable while configuring device. Notice that we need ; to loop this operation, testing the GIE bit of INTCON to be sure it is ; clear. The INTCON register is available across all 4 data memory banks ; and thus, we don't need to change bank selection bits to address it. __WaitGIE_Disable bcf INTCON,GIE ;Clear the GIE bit of interrupt config btfsc INTCON,GIE ;Wait for bit to clear, and goto __WaitGIE_Disable ; loop while still set ;Disable peripheral interrupts bcf INTCON,PEIE ;Disable all peripheral interrupts ;Oscillator configuration. Note the use of a frequency bits macro here ; that is defined above specifically for the PIC16F690 device. We're ; configuring the device to use the internal oscillator at 4MHz. The ; Final two instructions in this section test for a stable oscillator ; before continuing. banksel OSCCON ;Select bank clrf OSCCON ; unset freq bits to start at 000 movlw __OSCCONFREQBITS ;Load bits into accumulator iorwf OSCCON, f ; or with current bank settings bsf OSCCON,SCS ;Set for two-step startup btfss OSCCON, HTS ;Test for stable oscillator goto $-1 ; still clear, keep looping ;Be sure to set all pins to digital IO banksel ANSELH clrf ANSELH banksel ANSEL clrf ANSEL bcf INTCON,PEIE ;Enable all peripheral interrupts bsf INTCON,GIE ;Enable interrupts globally ;----------------------------------------------------------------------- ;Configure ports movlw b'00100000' ;All ports outputs except RB5 (RX) movwf TRISB ;----------------------------------------------------------------------- ;Configure Serial peripheral ; banksel TXSTA bsf TXSTA, TXEN ;Enable transmitter bcf TXSTA, SYNC ;Enable Async bsf TXSTA, BRGH banksel RCSTA bsf RCSTA, SPEN ;Configure RX input pin for receiver bsf RCSTA, CREN ;Enable receiver banksel BAUDCTL bcf BAUDCTL, BRG16 banksel SPBRG movlw .25 movwf SPBRG banksel SPBRGH clrf SPBRGH Main: ;Select the TX output register and move and distance measurement ; signal value to be transmitted to the USRange module. banksel TXREG movlw START_RANGE movwf TXREG ;Wait for the TRMT bit to clear, indicating that the data has been ; shifted out of the transmit buffer and sent to the range module. banksel TXSTA btfsc TXSTA, TRMT goto $-1 ;After transmit, wait for 50ms before reading serial FIFO. 10ms is more ; than enough time, but we'll read at 50ms intervals for now. This ; should eventually be configurable (ie: not necessary to use power when ; the module is stationary and perhaps performing other tasks). banksel count movlw .200 movwf count __Main_sleepLoop ;Wait for about 250 micro seconds before we check the serial peripheral ; interrupt flag. Interrupts are enabled for this peripheral, but the ; bit will still set when data is received. The interrupts registers ; are used to communicate events such as these even when the actual ; interrupt functionality is not enabled. _Delay250us decfsz count, f goto __Main_sleepLoop ;Check the interrupt flag for received data banksel PIR1 btfss PIR1, RCIF ;Check data received flag. goto Main ;No data received so start over ;Disable interrupts for the SSP module so we don't receive interrupts ; while reading the serial data. Interrupts that occur during this time ; will be generated when the global and peripheral interrupts are ; enabled after we're finished with the serial peripheral. banksel PIE1 bcf PIE1, SSPIE ;Data received. The module will return two bytes of data in MSB first ; (big endian) order. If we wanted to be thorough, we could check the ; peripheral interrupt bit for the serial UART to be sure we had a ; valid second byte. The values are written to the two byte data ; reserved at timedelay. banksel RCREG movf RCREG, w banksel timedelay movwf timedelay banksel RCREG movf RCREG, w banksel timedelay+1 movwf timedelay+1 ;Do something with data in timedelay. The word data is the detected ; range in mm with the MSB stored in timedeal and the LSB in ; timedelay+1. __Main_end ;Enable interrupts banksel PIE1 bsf PIE1, SSPIE goto Main ;Loop back to main ;----------------------------------------------------------------------------- ; Function: Interrupt ; Purpose: ;----------------------------------------------------------------------------- Interrupt: retfie ;Return from interrupt handler end ;Stop assembly